Développeur technique – avril 2019 – Exposition « Invisible Man » Pittsburgh
Fauteuil à roulettes robotisé et fauteuil roulant, 2014 – 2019
Samuel Bianchini
Didier Bouchon : réalisation électronique et informatique (programmation des comportements)
Colin Bouvry : développement du système de localisation et mapping
Réalisation matérielle : Adrien Bonnerot
Projet conçu et prototypé dans le cadre de l’axe de recherche “Behavioral Objects”
de l’équipe Reflective Interaction d’EnsadLab (laboratoire de l’École nationale supérieure des Arts Décoratifs – Université PSL)
Remerciements : Emmanuel Mahé, Filipe Pais, Emanuele Quinz, Nicolas Reeves


Deux fauteuils sont dans le même espace, une salle ou une scène vide de toute autre chose. L’un est un fauteuil à roulettes, un fauteuil de travail, de décideur. L’autre est un fauteuil roulant, pour les handicapés. Le premier bouge doucement, seul, avec un rythme très variable, hésitant. Il semble se diriger vers l’autre, s’en approcher, parfois, pour le pousser, mais il n’y parvient pas ou peu souvent ; il paraît fruste, à la peine dans ses mouvements. Quand, enfin, il trouve à pousser le fauteuil roulant, c’est pour s’en dégager, toujours aussi maladroitement, comme envahi par le doute et l’incertitude. Le second fauteuil, pour handicapé, quant à lui, ne bouge pas par lui-même ; il attend d’être poussé. Il marque de sa puissance symbolique l’ensemble de la scène, tout en amplifiant ici l’incertitude de la place du handicap.


Fauteuil handicapé, prototype #3, 2019
Exposition « Invisible Man », commissariat de Murray Horne
Wood Street Galleries, Pittsburgh, avril 2019
Photos : © Samuel Bianchini – ADAGP
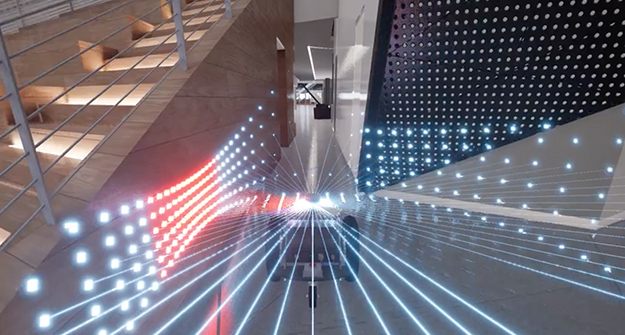
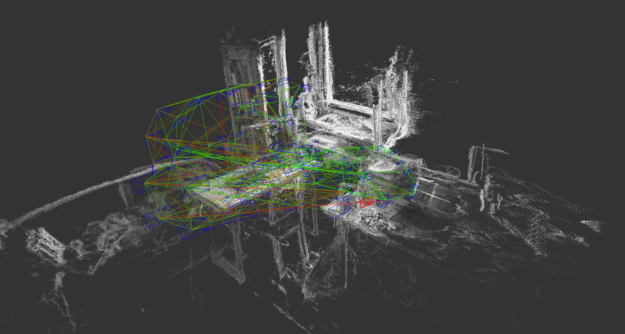
Le robot utilise un LIDAR (détection et estimation de la distance par la lumière), permettant de mesurer sous forme de point l’environnement dans lequel il se trouve. De plus le robot est capable de se repérer dans une cartographie, grâce au SLAM (localisation et cartographie simultanées) , il consiste, pour un robot ou véhicule autonome, à simultanément construire ou améliorer une carte de son environnement et de s’y localiser.